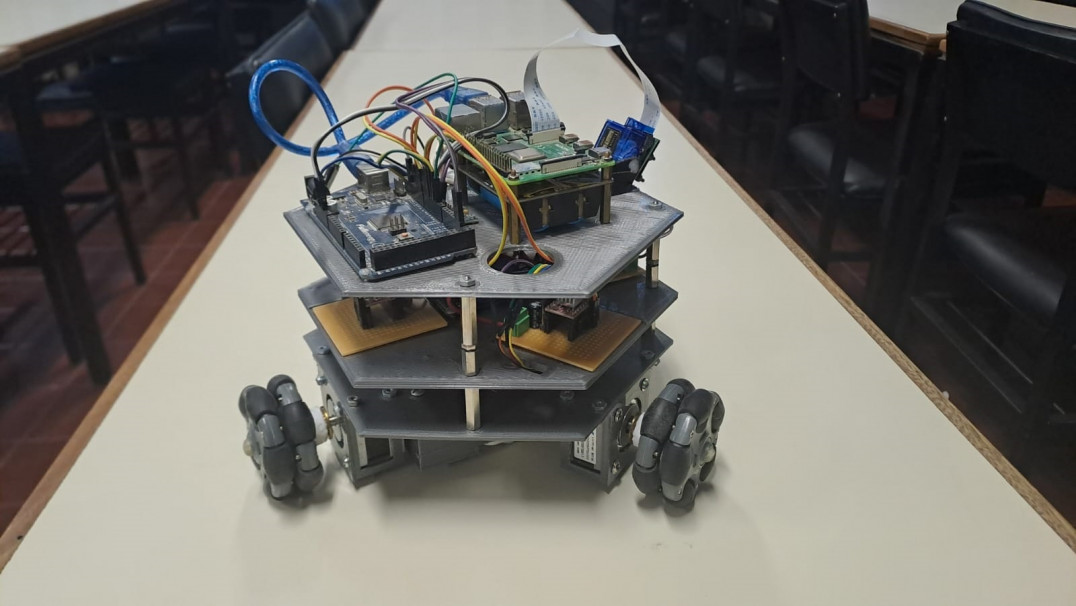
Exploración aumentada mediante robot holonómico diferencial con visión robótica para búsqueda y rescate. Así se tituló el proyecto final que defendió Maximiliano García Girón para concluir la carrera de Ingeniería Mecatrónica de la Facultad de Ingeniería (FI) de la Universidad Nacional de Cuyo. Dirigido por Selva Rivera, el estudiante construyó un prototipo funcional de gran valor académico y que sirve de base para futuros desarrollos.
Se trata de un robot teleoperado con capacidad de detectar y clasificar elementos claves del entorno mediante visión artificial y con conocimiento de su ubicación mediante un sistema de navegación odométrico-inercial. Información que el operario puede disponer a través de una interfaz en computadora para explorar en forma remota entornos peligrosos.
Girón trabajó el proyecto con un abordaje multidisciplinario que incluyó:
- El diseño, construcción y modelización de todos los elementos de la plataforma holonómica diferencial.
- La programación del control electrónico de los motores.
- El desarrollo e implementación del sistema de visión robótica con todas las etapas de diseño y aprendizaje de IA.
- El sistema de navegación odométrica-inercial con filtrado de Kalman.
- La interfaz de usuario y la comunicación entre todos los subsistemas que corren en un microcontrolador, una SBC y una computadora.